





Robot grippers – End of arm (EOA)
Robot grippers – End of arm (EOA)
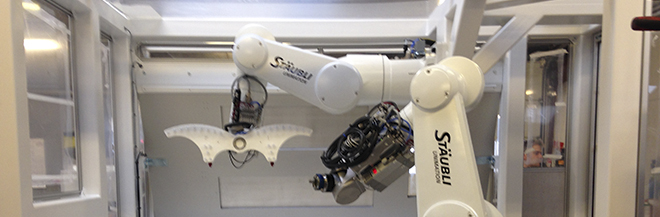
The secret to a robust and effective automation solution with the use of robots is both in the programming but also in the design of the gripper (also referred to as End of arm tool (EOAT)) to handle the part.
We develop both electric and pneumatic grippers for part handling depending on the shape and character of the part.
Increasingly, we use 3D printed parts (SLS and SLA) as the foundation of the gripper, which both provides increased flexibility in terms of design, but is also quick to reproduce in case of wear/damage.
For further information, please contact:
MORTEN MØLLER
| Projektleder |
| +45 2096 0760 |
| mm@saxe-group.com |
| AREAS: |
| Automation, 6-Aksede robotter, IML systemer |
KASPER BAASTRUP HAUN
| CTO |
| + 45 2127 1599 |
| kbh@saxe-group.com |
| AREAS: |
| Automation, 6-Aksede robotter, IML systemer |
DENNIZ HONKALA
| Sales Manager |
| +46 76 2302550 |
| dho@saxe-group,com |
| AREAS: |
| Automation, Extrusion lines, Blowmoulding, Auxiliary Equipment |